ROBÓTICA, AUTOMAÇÃO E CONTROLE
Hands on: ferramentas, tutoriais,frameworks, práticas, e aplicações
O rol de sites aqui apresentado com ferramentas, projetos e práticas tem caráter informativo. Os projetos, ferramentas e práticas não foram necessariamente testados.
 LINGUAGENS E SO
LINGUAGENS E SO
LIVROS E PUBLICAÇÕES
FERRAMENTAS e FRAMEWORKS
TUTORIAIS
CURSOS
EVENTOS
MODELISMO
AUTOMATOS
MECANISMOS
SIMULADORES
ARTIGOS
APLICAÇÕES, PROJETOS E DEMONSTRAÇÕES
VÍDEOS
ORGANIZAÇÕES
BLOGS
COMUNIDADES
NOTÍCIAS
PODCASTS
GLOSSÁRIOS
LINGUAGENS E SISTEMAS OPERACIONAIS
Linguagem - Python é uma linguagem de programação amigável, de fácil aprendizagem e aberta.

Sistema Operacional - ROS - Robot Operating System
The Robot Operating System (ROS) is a set of software libraries and tools that help you build robot applications. From drivers to state-of-the-art algorithms, and with powerful developer tools, ROS has what you need for your next robotics project. And it's all open source.

Video: What is ROS?

Wiki ROS 1

ROS 2 Documentation
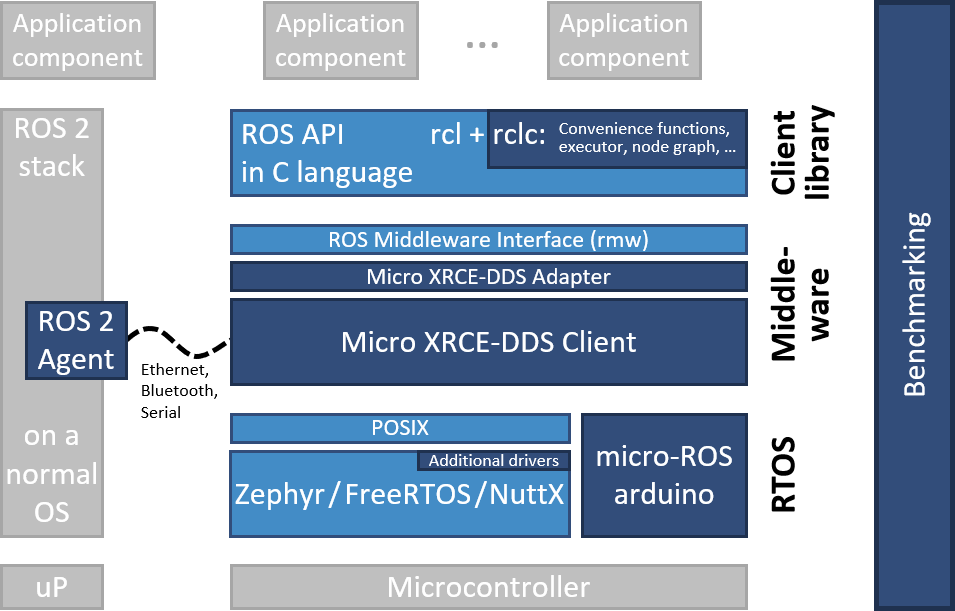
micro-ROS puts ROS 2 onto microcontrollers

Sistema Operacional - Apache NuttX Operating System
NuttX is a real-time operating system (RTOS) with an emphasis on standards compliance and small footprint. Scalable from 8-bit to 32-bit microcontroller environments, the primary governing standards in NuttX are Posix and ANSI standards. Additional standard APIs from Unix and other common RTOS’s (such as VxWorks) are adopted for functionality not available under these standards, or for functionality that is not appropriate for deeply-embedded environments (such as fork()).

Sistema Operacional - Linux Debian
Debian Science Robotics packages. Official Debian packages with high relevance

The Robot Operating System (ROS) is a set of software libraries and tools that help you build robot applications. From drivers to state-of-the-art algorithms, and with powerful developer tools, ROS has what you need for your next robotics project. And it's all open source.
NuttX is a real-time operating system (RTOS) with an emphasis on standards compliance and small footprint. Scalable from 8-bit to 32-bit microcontroller environments, the primary governing standards in NuttX are Posix and ANSI standards. Additional standard APIs from Unix and other common RTOS’s (such as VxWorks) are adopted for functionality not available under these standards, or for functionality that is not appropriate for deeply-embedded environments (such as fork()).
Debian Science Robotics packages. Official Debian packages with high relevance
LIVROS E PUBLICAÇÕES

BOOK - Programming Multiple Robots with ROS 2
This is a online book about multi-robot systems. It introduces the Robot Operating System 2 (ROS 2) as well as the Robot Middleware Framework (RMF), which is built on ROS 2 and tries to simplify the creation and operation of complex multi-robot systems.
BOOK - Service Robot Applications
Edited by Yoshihiko Takahashi - 2008
Kanagawa Institute of Technology, Japan
The aim of this book is to provide new ideas, original results and practical experiences regarding service robotics. This book provides only a small example of this research activity, but it covers a great deal of what has been done in the field recently. Furthermore, it works as a valuable resource for researchers interested in this field.
BOOK - Cutting Edge Robotics
Edited by Vedran Kordic - 2010
TU Wien, Austria
Robotics research, especially mobile robotics is a young field. Its roots include many engineering and scientific disciplines from mechanical, electrical and electronics engineering to computer, cognitive and social sciences. Each of this parent fields is exciting in its own way and has its share in different books. This book is a result of inspirations and contributions from many researchers worldwide. It presents a collection of a wide range of research results in robotics scientific community.
BOOK - Recent Advances in Multi Robot Systems
Edited by Alex Lazinica - 2008
TU Wien, Austria
To design a team of robots which is able to perform given tasks is a great concern of many members of robotics community. There are many problems left to be solved in order to have the fully functional robot team. Robotics community is trying hard to solve such problems (navigation, task allocation, communication, adaptation, control, ...). This book represents the contributions of the top researchers in this field and will serve as a valuable tool for professionals in this interdisciplinary field. It is focused on the challenging issues of team architectures, vehicle learning and adaptation, heterogeneous group control and cooperation, task selection, dynamic autonomy, mixed initiative, and human and robot team interaction. The book consists of 16 chapters introducing both basic research and advanced developments. Topics covered include kinematics, dynamic analysis, accuracy, optimization design, modelling, simulation and control of multi robot systems.
BOOK - New Approaches in Automation and Robotics
Edited by Harald Aschemann - 2008
University of Rostock, Germany
This book offers in 22 chapters a collection of recent developments in automation, robotics as well as control theory. It is dedicated to researchers in science and industry, students, and practicing engineers, who wish to update and enhance their knowledge on modern methods and innovative applications. The authors and editor of this book wish to motivate people, especially under-graduate students, to get involved with the interesting field of robotics and mechatronics. We hope that the ideas and concepts presented in this book are useful for your own work and could contribute to problem solving in similar applications as well. It is clear, however, that the wide area of automation and robotics can only be highlighted at several spots but not completely covered by a single book.
BOOK - Mobile Robots: : Towards New Applications
Edited by Alex Lazinica- 2008
TU Wien, Austria
This book is the result of inspirations and contributions from many researchers worldwide. It presents a collection of wide range research results of robotics scientific community. Various aspects of current research in new robotics research areas and disciplines are explored and discussed. It is divided in three main parts covering different research areas: Humanoid Robots, Human-Robot Interaction, and Special Applications.
BOOK - Industrial Robotics: Programming, Simulation and Applications
Edited by Kin Huat Low- 2006
Nanyang Technological University, Singapore
This book covers a wide range of topics relating to advanced industrial robotics, sensors and automation technologies. Although being highly technical and complex in nature, the papers presented in this book represent some of the latest cutting edge (2006) technologies and advancements in industrial robotics technology. This book covers topics such as networking, properties of manipulators, forward and inverse robot arm kinematics, motion path-planning, machine vision and many other practical topics too numerous to list here.
BOOK - Humanoid Robots - New Developments
Edited by Armando Carlos De Pina Filho- 2008
Federal University of Rio de Janeiro, Brazil
For many years, the human being has been trying, in all ways, to recreate the complex mechanisms that form the human body. Such task is extremely complicated and the results are not totally satisfactory. However, with increasing technological advances based on theoretical and experimental researches, man gets, in a way, to copy or to imitate some systems of the human body. These researches not only intended to create humanoid robots, great part of them constituting autonomous systems, but also, in some way, to offer a higher knowledge of the systems that form the human body, objectifying possible applications in the technology of rehabilitation of human beings, gathering in a whole studies related not only to Robotics, but also to Biomechanics, Biomimmetics, Cybernetics, among other areas. This book presents a series of researches inspired by this ideal, carried through by various researchers worldwide, looking for to analyze and to discuss diverse subjects related to humanoid robots. The presented contributions explore aspects about robotic hands, learning, language, vision and locomotion.
BOOK - Robot Control
Edited by Efren Gorrostieta Hurtado -
Autonomous University of Queretaro
This book includes a selection of research papers in robot control applications. The description of projects using robotic systems in areas such as vision, navigation, path planning, trajectories, non-holonomic systems, mobile robotics, robot control with very specific structures, as well as artificial intelligence systems is pointed out. It also presents several tools and mathematical concepts that allow the development and operation of robotic systems. Additionally, the development of different ideas in control systems that are useful and hopefully enriching for the reader are also presented in this book.
MAGAZINE - Robotic Magazine
This is a online book about multi-robot systems. It introduces the Robot Operating System 2 (ROS 2) as well as the Robot Middleware Framework (RMF), which is built on ROS 2 and tries to simplify the creation and operation of complex multi-robot systems.
Edited by Yoshihiko Takahashi - 2008
Kanagawa Institute of Technology, Japan
The aim of this book is to provide new ideas, original results and practical experiences regarding service robotics. This book provides only a small example of this research activity, but it covers a great deal of what has been done in the field recently. Furthermore, it works as a valuable resource for researchers interested in this field.
Edited by Vedran Kordic - 2010
TU Wien, Austria
Robotics research, especially mobile robotics is a young field. Its roots include many engineering and scientific disciplines from mechanical, electrical and electronics engineering to computer, cognitive and social sciences. Each of this parent fields is exciting in its own way and has its share in different books. This book is a result of inspirations and contributions from many researchers worldwide. It presents a collection of a wide range of research results in robotics scientific community.
Edited by Alex Lazinica - 2008
TU Wien, Austria
To design a team of robots which is able to perform given tasks is a great concern of many members of robotics community. There are many problems left to be solved in order to have the fully functional robot team. Robotics community is trying hard to solve such problems (navigation, task allocation, communication, adaptation, control, ...). This book represents the contributions of the top researchers in this field and will serve as a valuable tool for professionals in this interdisciplinary field. It is focused on the challenging issues of team architectures, vehicle learning and adaptation, heterogeneous group control and cooperation, task selection, dynamic autonomy, mixed initiative, and human and robot team interaction. The book consists of 16 chapters introducing both basic research and advanced developments. Topics covered include kinematics, dynamic analysis, accuracy, optimization design, modelling, simulation and control of multi robot systems.
Edited by Harald Aschemann - 2008
University of Rostock, Germany
This book offers in 22 chapters a collection of recent developments in automation, robotics as well as control theory. It is dedicated to researchers in science and industry, students, and practicing engineers, who wish to update and enhance their knowledge on modern methods and innovative applications. The authors and editor of this book wish to motivate people, especially under-graduate students, to get involved with the interesting field of robotics and mechatronics. We hope that the ideas and concepts presented in this book are useful for your own work and could contribute to problem solving in similar applications as well. It is clear, however, that the wide area of automation and robotics can only be highlighted at several spots but not completely covered by a single book.
Edited by Alex Lazinica- 2008
TU Wien, Austria
This book is the result of inspirations and contributions from many researchers worldwide. It presents a collection of wide range research results of robotics scientific community. Various aspects of current research in new robotics research areas and disciplines are explored and discussed. It is divided in three main parts covering different research areas: Humanoid Robots, Human-Robot Interaction, and Special Applications.
Edited by Kin Huat Low- 2006
Nanyang Technological University, Singapore
This book covers a wide range of topics relating to advanced industrial robotics, sensors and automation technologies. Although being highly technical and complex in nature, the papers presented in this book represent some of the latest cutting edge (2006) technologies and advancements in industrial robotics technology. This book covers topics such as networking, properties of manipulators, forward and inverse robot arm kinematics, motion path-planning, machine vision and many other practical topics too numerous to list here.
Edited by Armando Carlos De Pina Filho- 2008
Federal University of Rio de Janeiro, Brazil
For many years, the human being has been trying, in all ways, to recreate the complex mechanisms that form the human body. Such task is extremely complicated and the results are not totally satisfactory. However, with increasing technological advances based on theoretical and experimental researches, man gets, in a way, to copy or to imitate some systems of the human body. These researches not only intended to create humanoid robots, great part of them constituting autonomous systems, but also, in some way, to offer a higher knowledge of the systems that form the human body, objectifying possible applications in the technology of rehabilitation of human beings, gathering in a whole studies related not only to Robotics, but also to Biomechanics, Biomimmetics, Cybernetics, among other areas. This book presents a series of researches inspired by this ideal, carried through by various researchers worldwide, looking for to analyze and to discuss diverse subjects related to humanoid robots. The presented contributions explore aspects about robotic hands, learning, language, vision and locomotion.
Edited by Efren Gorrostieta Hurtado -
Autonomous University of Queretaro
This book includes a selection of research papers in robot control applications. The description of projects using robotic systems in areas such as vision, navigation, path planning, trajectories, non-holonomic systems, mobile robotics, robot control with very specific structures, as well as artificial intelligence systems is pointed out. It also presents several tools and mathematical concepts that allow the development and operation of robotic systems. Additionally, the development of different ideas in control systems that are useful and hopefully enriching for the reader are also presented in this book.
APLICATIVOS, FERRAMENTAS, PLATAFORMAS e FRAMEWORKS
Open-RMF - Open Robotics Middleware Framework (Open-RMF)
(Open-RMF) is a free, open source, modular software system that coordinates multiple fleets of indoor and outdoor robots with typical robotic use cases and integrates them with elevators/lifts, doors and other infrastructure. RMF is an umbrella term for a wide range of open specifications and software tools that aim to ease the integration and interoperability of robotic systems, building infrastructure, and user interfaces.

Repositório do Open-RMF no github.
Blynk - Unified plataform. A fully integrated suite of IoT software.
One app to prototype, deploy, and remotely manage connected electronic devices at any scale.

Platformio - Unified plataform. A fully integrated suite of IoT software.
Professional collaborative platform for embedded development. Cross-platform PlatformIO IDE and Unified Debugger · Static Code Analyzer and Remote Unit Testing · Multi-platform and Multi-architecture Build System · Firmware File Explorer and Memory Inspection.

Arduino IDE - Unified plataform. A fully integrated suite of IoT software.
The Arduino Integrated Development Environment - or Arduino Software (IDE) - contains a text editor for writing code, a message area, a text console, a toolbar with buttons for common functions and a series of menus. It connects to the Arduino hardware to upload programs and communicate with them.The open-source Arduino Software (IDE) makes it easy to write code and upload it to the board. This software can be used with any Arduino board.

Repositório do Arduino Software no github.
Arduino Web Editor - Unified plataform. A fully integrated suite of IoT software.
The Web Editor is a great choice for working with your Arduino board. It stores all of your sketches online, requires no installation of cores and includes most of the popular libraries. Getting started with the Web Editor is quick & easy, and in this tutorial, we will walk you through the necessary steps so you can use it with your Arduino board.
(Open-RMF) is a free, open source, modular software system that coordinates multiple fleets of indoor and outdoor robots with typical robotic use cases and integrates them with elevators/lifts, doors and other infrastructure. RMF is an umbrella term for a wide range of open specifications and software tools that aim to ease the integration and interoperability of robotic systems, building infrastructure, and user interfaces.
One app to prototype, deploy, and remotely manage connected electronic devices at any scale.
Professional collaborative platform for embedded development. Cross-platform PlatformIO IDE and Unified Debugger · Static Code Analyzer and Remote Unit Testing · Multi-platform and Multi-architecture Build System · Firmware File Explorer and Memory Inspection.
The Arduino Integrated Development Environment - or Arduino Software (IDE) - contains a text editor for writing code, a message area, a text console, a toolbar with buttons for common functions and a series of menus. It connects to the Arduino hardware to upload programs and communicate with them.The open-source Arduino Software (IDE) makes it easy to write code and upload it to the board. This software can be used with any Arduino board.
The Web Editor is a great choice for working with your Arduino board. It stores all of your sketches online, requires no installation of cores and includes most of the popular libraries. Getting started with the Web Editor is quick & easy, and in this tutorial, we will walk you through the necessary steps so you can use it with your Arduino board.
TUTORIAIS E GUIAS
Tutoriais | da Robocore.

Gazebo Tutorials

Gazebo Tutorials - Install on Windows
This documentation describes how to set up a workspace for trying to compile Gazebo on Windows. The support for the Gazebo Windows compilation has been completed since version 9.
ROS tutorials | By Justin Huang
A series of 7 videos explaining ROS concepts, with a focus on mobile service robotics and software engineering.
ROS tutorial #1: Introduction, Installing ROS, and running the Turtlebot simulator
ROS tutorial #2: Publishers and subscribers
ROS tutorial #2.1: C++ walkthrough of publisher / subscriber lab
ROS tutorial #2.2: Python walkthrough of publisher/subscriber lab
ROS Tutorial #3: Services Intro
ROS Tutorial #3.1: C++ Services
ROS Tutorial #3.2: Python Services
ROS tutorial for Beginners | By Shawn Chen
A series of 10 videos explaining ROS since preparation, install and configure the ROS environment up to controller implementation.
ROS tutorial #1: Introduction ans preparation.
ROS tutorial #2: Install and configure environment
ROS tutorial #3: Navigation ROS filesystem
ROS tutorial #4: Create and build ROS package
ROS Tutorial #5: ROS topic, nodes, messages - Part 1
ROS Tutorial #6: ROS topic, nodes, messages - Part 2
ROS Tutorial #7: Publisher & SUbscriber - Part 1
ROS Tutorial #8: Publisher & SUbscriber - Part 2
ROS Tutorial #9: Publisher & SUbscriber - Part 3 (Controller)
ROS Tutorial #10: Controller Implementation
ROS tutorial for Beginners: ROS in 5 Days | By The Construct
A series of 10 videos explaining ROS since overview up to debugging tools.
#1 ROS BASICS IN 5 DAYS #1 - Course Overview & Introduction
#2 ROS BASICS IN 5 DAYS #2 - Learn ROS Without Installation & Programming Turtlebot
#3 [ROS tutorial for beginners] Chapter 2. ROS Basic Concepts.
#4 [ROS Tutorial] #Topics 1: Publishers, Subscribers, and programming Turtlebot simulator
#5 [ROS tutorial] Chapter 2.2: ROS Topics Part 2 - Subscribers, Publisher, Messages
#6 [ROS Tutorial] Chapter 3.1: ROS Services + programming Wam robot-arm (Python)
#7 ROS BASICS IN 5 DAYS #7 - ROS Services | Part2
#8 [Intro. for ROS Beginners] Chapter 4: ROS Actions Tutorial #Part 1
#9 [Intro. for ROS Beginners] Chapter 4: ROS Actions Tutorial #Part 2
#10 [ROS Tutorials] Chapter 5: ROS Debugging Tools
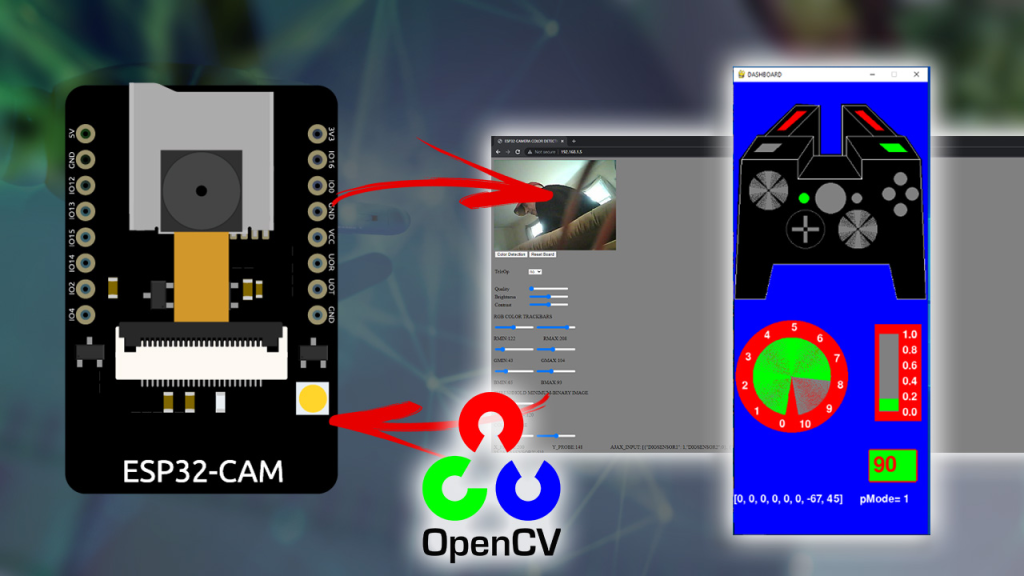
ESP32-CAM Robotics with OpenCV: Autonomous and Teleop Operation with XBOX Controller
In this article, we want to share a work developed by one of our readers that shows how to use the ESP32/ESP32-CAM streaming servers in robotic systems using OpenCV or OpenCV.js.
This documentation describes how to set up a workspace for trying to compile Gazebo on Windows. The support for the Gazebo Windows compilation has been completed since version 9.
A series of 7 videos explaining ROS concepts, with a focus on mobile service robotics and software engineering.
A series of 10 videos explaining ROS since preparation, install and configure the ROS environment up to controller implementation.
A series of 10 videos explaining ROS since overview up to debugging tools.
In this article, we want to share a work developed by one of our readers that shows how to use the ESP32/ESP32-CAM streaming servers in robotic systems using OpenCV or OpenCV.js.
CURSOS
Curso de Blynk - "Arduino Mobile Development with Blynk". | Tech Explorations
With this course, you will learn how to use the Blynk platform to create apps for iOS and Android that work with the Arduino Nano 33 IoT and the ESP32 or any other supported device.
With a Blynk smartphone app, you will be able to create powerful applications that integrate your smartphone with any supported device to read data from sensors, control motors, log data, and send out notifications.
The Blynk Platform consists of a smartphone application for Apple iOS and Android, microcontroller libraries for dozens of devices like the Arduino MKR 1010, and server software for Linux or Windows hosts.
This course is perfect for people who want to create mobile phone-powered microcontroller applications.
Arduino Mobile Development with Blynk Course
Curso de BLYNK - 01.20 Software you will need
Curso de BLYNK - 01.30 Hardware you will need
Curso de BLYNK - 01.40 A quick review of the Blynk platform
Curso de BLYNK - 01.50 How to get the most out of this course
Curso de BLYNK - 02.20 The Arduino Nano 33 IoT
Curso de BLYNK - 02.30 Install the Blynk app, create an account
Curso de BLYNK - 02.40 Create a new Blynk app
Curso de BLYNK - 02.50 How to use a virtual pin

Programming for Robotics (ROS) | By Robotic Systems Lab | ETH Zurich
A series of 07 videos: ROS case-study presentation by Dominic Jud as part of the ETH Zurich lecture "Programming for Robotics: ROS".
You can download all the course material >>>> here <<<<.
ROS Noetic for beginners | By Edouard Rernard at Robotics Back-End
A series of 11 since install and setup up to ROS Service Client with Python .
Cursos de Linux, Python 3 and C++ for Robotics. | The Construct
Full access to 3 basics courses: Linux for Robotics, Python3 for Robotics and C++ for Robotics
With a Blynk smartphone app, you will be able to create powerful applications that integrate your smartphone with any supported device to read data from sensors, control motors, log data, and send out notifications.
The Blynk Platform consists of a smartphone application for Apple iOS and Android, microcontroller libraries for dozens of devices like the Arduino MKR 1010, and server software for Linux or Windows hosts.
This course is perfect for people who want to create mobile phone-powered microcontroller applications.
A series of 07 videos: ROS case-study presentation by Dominic Jud as part of the ETH Zurich lecture "Programming for Robotics: ROS".
A series of 11 since install and setup up to ROS Service Client with Python .
EVENTOS
LISTA DE EVENTOS RELACIONADOS À ROBÓTICA E TECNOLOGIAS AFINS
O rol de eventos aqui apresentados tem caráter informativo. A oferta e realização são de responsabilidade de seus organizadores e promotores.
09NOV2023 - Rob(IóT)ica: a Internet das Coisas Robóticas 🤖
Transmissão pelo canais do Tudo Sobre IoT no Youtube e no Linkedin
☛ Na próxima quinta-feira , dia 09 de novembro às 18 horas, será realizada a palestra que abordará o mercado, aplicações e tendências da Robótica, sob a perspectiva da Internet das Coisas .
☛ A palestra será ministrada pelo Prof.Lourival Moreira e faz parte da Conferência Online Internet das Coisas, que está ocorrendo de 06 a 10 de novembro, com transmissão gratuita pelo canais da comunidade Tudo Sobre IoT no Youtube e no Linkedin. Além da inscriçao gratuita, existe a possibilidade para os participantes de inscrição VIP, que dá acesso a todas as facilidades da Conferência (material, networking, certificado de participação ...).
☛ Serão também apresentados os projetos dos robôs sociais e de serviços pessoais que estão em desenvolvimento pela robo.tec.br: m@rIA (fembot), WillIAm (o robô garçon), CristIAn (o assistente pessoal); e o robô de serviço profissional HIGIA (desinfecção por UV-C), este último em parceria com a Universidade do Estado do Rio de Janeiro (UERJ) e a empresa C3 Engenharia.
☛ Página da Conferência (Inscrição, Programa...) >>> AQUI <<<< 
🤖 Acesse aqui a Palestra 
☛ A palestra será ministrada pelo Prof.Lourival Moreira e faz parte da Conferência Online Internet das Coisas, que está ocorrendo de 06 a 10 de novembro, com transmissão gratuita pelo canais da comunidade Tudo Sobre IoT no Youtube e no Linkedin. Além da inscriçao gratuita, existe a possibilidade para os participantes de inscrição VIP, que dá acesso a todas as facilidades da Conferência (material, networking, certificado de participação ...).
☛ Serão também apresentados os projetos dos robôs sociais e de serviços pessoais que estão em desenvolvimento pela robo.tec.br: m@rIA (fembot), WillIAm (o robô garçon), CristIAn (o assistente pessoal); e o robô de serviço profissional HIGIA (desinfecção por UV-C), este último em parceria com a Universidade do Estado do Rio de Janeiro (UERJ) e a empresa C3 Engenharia.
🤖 Acesse aqui a Palestra
MODELISMO
Arduino Para Modelismo | Canal no Youtube
Conteúdo sobre Arduino, Modelismo, Eletrônica, Programação e temas correlatos.
Carro de Controle Remoto Modelado com Cano de PVC - Projeto Jeep Willys - V01
Veja como fazer um carrinho de controle remoto caseiro inspirado no Jeep Willys. Sua estrutura é fabricada com placas de PVC retiradas de um cano de 40mm. Tem remoto total, com várias funções via celular.
Ebook Grátis - Como Fazer Miniatura de Jeep Willys Controle Remoto com Cano de PVC e Arduino - V02
Neste segundo vídeo do Projeto Jeep Willys com Arduino, está o passo a passo todo detalhada de como fazer a estrutura do carrinho de controle remoto. É mostrado como transformar um cano de PVC em uma placa e depois como cortar estas placas utilizando os moldes que estão no ebook Projeto Jeep Willys (eBook Grátis). Ainda é apresentado como colar as partes, com várias dicas e macetes para facilitar todo o processo.
Aprenda a Fazer um Jeep Willys de Controle Remoto com Cano de PVC e Arduino - V03
Neste terceiro vídeo do Projeto Jeep Willys de controle remoto com Arduino, apresenta-se a finalização da construção do Jeep de Controle Remoto. São apresentados:
* Sistema de tração, motor com redução eixos e rodas
* Sistema de direção com rodas que esterçam com servo motor
* Suporte e estepe do Jeep Willys feito com EVA
* Galão de combustível do Jeep Wills feito com EVA
* Volante feito com fio encapado
* Instalação dos leds dos faróis e lanternas.
Controle Remoto para Carrinhos e Projetos com Arduino - Esquema Elétrico - Projeto Jeep Willys - V04
Neste vídeo é explicado o esquema Elétrico do controle remoto do modelo Jeep Willys. O mesmo esquema serve de exemplo para equipar qualquer outro carrinho, miniatura, modelo ou projeto com controle remoto total via celular.
Eletrônica Experimental do Jeep Willys de PVC - Carrinho Controle Remoto com Arduino - V05
O vídeo mostra como montar os componente eletrônicos do Jeep Willys de controle remoto, como uma montagem experimental.
Faça um Controle Remoto com Celular - Projeto Jeep Willys com Arduino eBook Grátis - V06
O vídeo mostra como utilizar o celular para controlar seu carrinho de controle remoto.
Como Fazer um Jeep RC de Cano de PVC com Controle Remoto via Celular - V07
O último vídeo do Projeto Jeep Willys de controle remoto com Arduino, é finalizado o carrinho. Apresenta-se como:
* baixar e instalar o IDE do arduino;
* instalar o drive do Arduino Nano e configurá-lo no IDE;
* carregar o programa para o Arduino; e
* conectar o celular no módulo bluetooth para controlar nosso Jeep.
Conteúdo sobre Arduino, Modelismo, Eletrônica, Programação e temas correlatos.
Veja como fazer um carrinho de controle remoto caseiro inspirado no Jeep Willys. Sua estrutura é fabricada com placas de PVC retiradas de um cano de 40mm. Tem remoto total, com várias funções via celular.
Neste segundo vídeo do Projeto Jeep Willys com Arduino, está o passo a passo todo detalhada de como fazer a estrutura do carrinho de controle remoto. É mostrado como transformar um cano de PVC em uma placa e depois como cortar estas placas utilizando os moldes que estão no ebook Projeto Jeep Willys (eBook Grátis). Ainda é apresentado como colar as partes, com várias dicas e macetes para facilitar todo o processo.
Neste terceiro vídeo do Projeto Jeep Willys de controle remoto com Arduino, apresenta-se a finalização da construção do Jeep de Controle Remoto. São apresentados:
* Sistema de tração, motor com redução eixos e rodas
* Sistema de direção com rodas que esterçam com servo motor
* Suporte e estepe do Jeep Willys feito com EVA
* Galão de combustível do Jeep Wills feito com EVA
* Volante feito com fio encapado
* Instalação dos leds dos faróis e lanternas.
Neste vídeo é explicado o esquema Elétrico do controle remoto do modelo Jeep Willys. O mesmo esquema serve de exemplo para equipar qualquer outro carrinho, miniatura, modelo ou projeto com controle remoto total via celular.
O vídeo mostra como montar os componente eletrônicos do Jeep Willys de controle remoto, como uma montagem experimental.
O vídeo mostra como utilizar o celular para controlar seu carrinho de controle remoto.
O último vídeo do Projeto Jeep Willys de controle remoto com Arduino, é finalizado o carrinho. Apresenta-se como:
* baixar e instalar o IDE do arduino;
* instalar o drive do Arduino Nano e configurá-lo no IDE;
* carregar o programa para o Arduino; e
* conectar o celular no módulo bluetooth para controlar nosso Jeep.
AUTOMATOS DE MADEIRA
How to make gears
By Matthias Wandel
Vídeo
How to
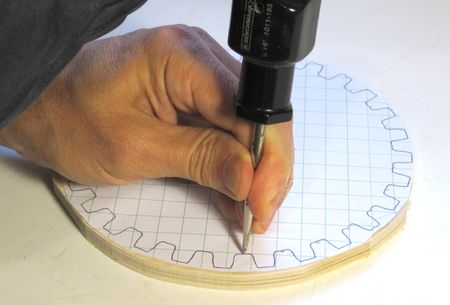
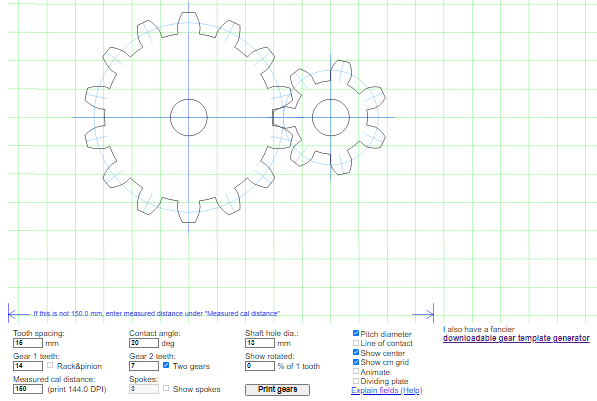
On line free program
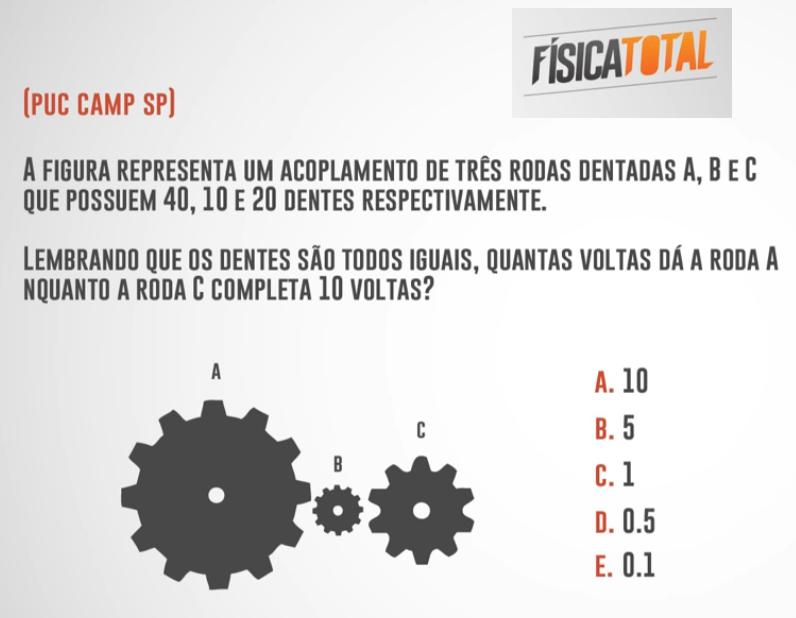
Transmissão de movimento: engrenagens
Por Canal Física Total | Youtube
Física da transmissão de movimento por engrenagens.
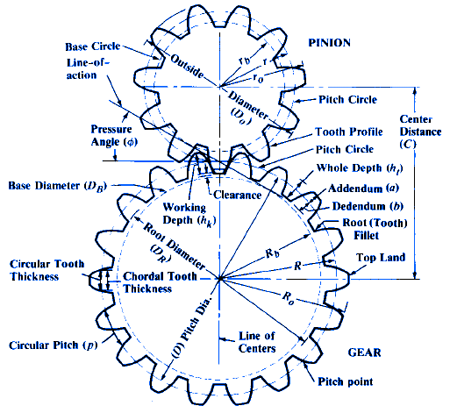
Design Equations and Formula Circular Pitches ans Equivalent Diametral Pitches Table
By Engineers Edge |
Gear Design and Selection Application
Cálculo de engrenagens
Transmissão de movimento: eixos (fabricação)
Por Canal Oficina Marcenaria Rústica | Youtube
Como fazer cavilha com furadeira: um gabarito de cavilha "faça você mesmo" com porcas (marcenaria para iniciantes).
Fabricação de eixo de madeira para autômato.

By Matthias Wandel
Por Canal Física Total | Youtube
By Engineers Edge |
Gear Design and Selection Application
Por Canal Oficina Marcenaria Rústica | Youtube
Como fazer cavilha com furadeira: um gabarito de cavilha "faça você mesmo" com porcas (marcenaria para iniciantes).
MECANISMOS
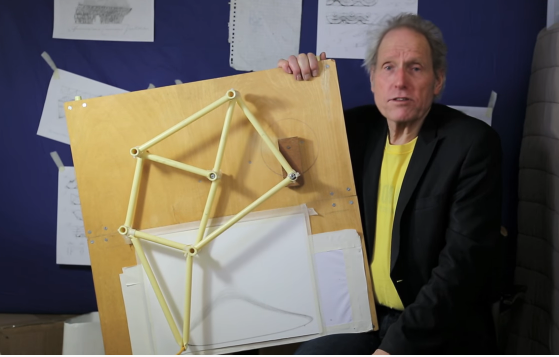
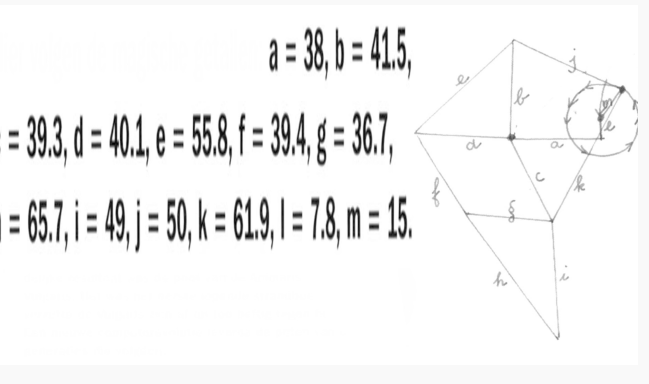
Theo Jansen: The Legsystem
By Theo Jansen | Youtube
Theo Jansen explains about the leg system he invented in 1991.
Mecanismo de Theo Jansen
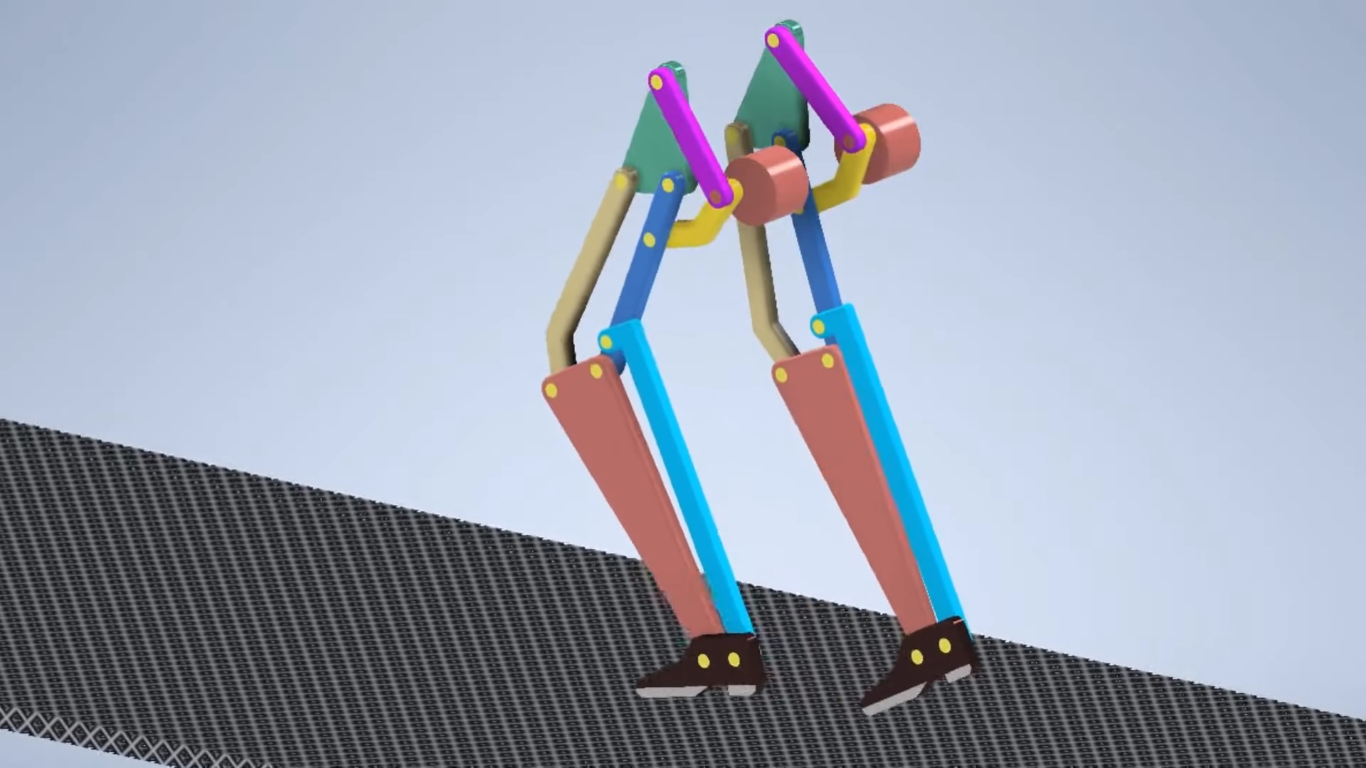
Leg-man Mechanism - Mechanical Principle
By Mechanical Design Masters | Youtube
This animation explains the structure and mechanical principles of a leg man walking mechanism.
Leg-man Mechanism
By Theo Jansen | Youtube
Theo Jansen explains about the leg system he invented in 1991.
By Mechanical Design Masters | Youtube
This animation explains the structure and mechanical principles of a leg man walking mechanism.
SIMULADORES
Simulador - Gazebo: simulador de robótica 3D em código aberto
Gazebo is a well-designed free software simulator wich makes possible to rapidly test algorithms, design robots, perform regression testing, and train AI system using realistic scenarios. Gazebo offers the ability to accurately and efficiently simulate populations of robots in complex indoor and outdoor environments. It has a robust physics engine, high-quality graphics, and convenient programmatic and graphical interfaces.
Tool Box - Ignition - Open Source Libraries
Ignition brings a fresh approach to simulation with a complete toolbox of development libraries and cloud services to make simulation easy. Iterate fast on your new physical designs in realistic environments with high fidelity sensors streams. Test control strategies in safety, and take advantage of simulation in continuous integration tests.

Simulador - Webots: Open Source Robot Simulator
Webots is an open source and multi-platform desktop application used to simulate robots. It provides a complete development environment to model, program and simulate robots. It has been designed for a professional use, and it is widely used in industry, education and research. Cyberbotics Ltd. maintains Webots as its main product continuously since 1998.

Simulador - Open Rave: Open Source Robot Simulator
OpenRAVE provides an environment for testing, developing, and deploying motion planning algorithms in real-world robotics applications. The main focus is on simulation and analysis of kinematic and geometric information related to motion planning. OpenRAVE's stand-alone nature allows is to be easily integrated into existing robotics systems. It provides many command line tools to work with robots and planners, and the run-time core is small enough to be used inside controllers and bigger frameworks. An important target application is industrial robotics automation.

Simulador - CoppeliaSim: create, compose and simulate robots
The robot simulator CoppeliaSim, with integrated development environment, is based on a distributed control architecture: each object/model can be individually controlled via an embedded script, a plugin, a ROS node, a remote API client, or a custom solution. This makes CoppeliaSim very versatile and ideal for multi-robot applications. Controllers can be written in C/C++, Python, Java, Lua, Matlab or Octave. CoppeliaSim is used for fast algorithm development, factory automation simulations, fast prototyping and verification, robotics related education, remote monitoring, safety double-checking, as digital twin, and much more.

Simulador - CoppeliaSim: Getting Started with the CoppeliaSim Simulator
Instructions for using the the cross-platform CoppeliaSim robot simulator (formerly known as V-REP) to allow to visualize the motions of robots.
Gazebo is a well-designed free software simulator wich makes possible to rapidly test algorithms, design robots, perform regression testing, and train AI system using realistic scenarios. Gazebo offers the ability to accurately and efficiently simulate populations of robots in complex indoor and outdoor environments. It has a robust physics engine, high-quality graphics, and convenient programmatic and graphical interfaces.
Ignition brings a fresh approach to simulation with a complete toolbox of development libraries and cloud services to make simulation easy. Iterate fast on your new physical designs in realistic environments with high fidelity sensors streams. Test control strategies in safety, and take advantage of simulation in continuous integration tests.
Webots is an open source and multi-platform desktop application used to simulate robots. It provides a complete development environment to model, program and simulate robots. It has been designed for a professional use, and it is widely used in industry, education and research. Cyberbotics Ltd. maintains Webots as its main product continuously since 1998.
OpenRAVE provides an environment for testing, developing, and deploying motion planning algorithms in real-world robotics applications. The main focus is on simulation and analysis of kinematic and geometric information related to motion planning. OpenRAVE's stand-alone nature allows is to be easily integrated into existing robotics systems. It provides many command line tools to work with robots and planners, and the run-time core is small enough to be used inside controllers and bigger frameworks. An important target application is industrial robotics automation.
The robot simulator CoppeliaSim, with integrated development environment, is based on a distributed control architecture: each object/model can be individually controlled via an embedded script, a plugin, a ROS node, a remote API client, or a custom solution. This makes CoppeliaSim very versatile and ideal for multi-robot applications. Controllers can be written in C/C++, Python, Java, Lua, Matlab or Octave. CoppeliaSim is used for fast algorithm development, factory automation simulations, fast prototyping and verification, robotics related education, remote monitoring, safety double-checking, as digital twin, and much more.
Instructions for using the the cross-platform CoppeliaSim robot simulator (formerly known as V-REP) to allow to visualize the motions of robots.
ARTIGOS, APPLICATION NOTES E WHITE PAPERS
ARTIGO - People emotionally tied to robots can undermine relationships with co-workers
By University of Michigan | On February 21, 2022
Reading - Self-Driving Robot Navigation Methodology Explained
By Spencer Allen | Aethon Inc.

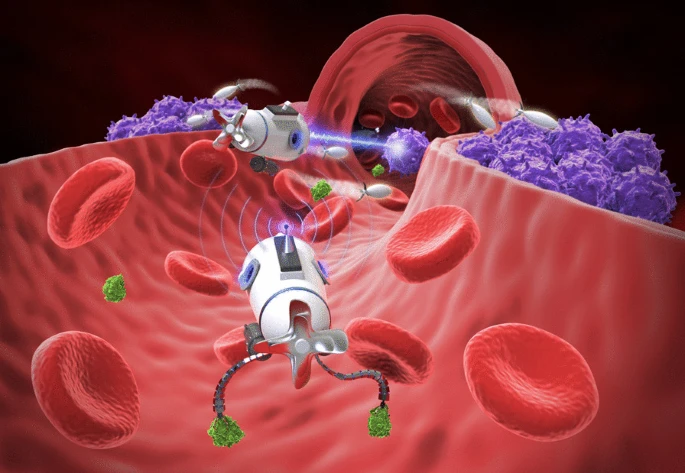
Reading - Advances of medical nanorobots for future cancer treatments
By Xiangyi Kong et al | Journal of Hematology & Oncology/BMC | Published: 14 July 2023

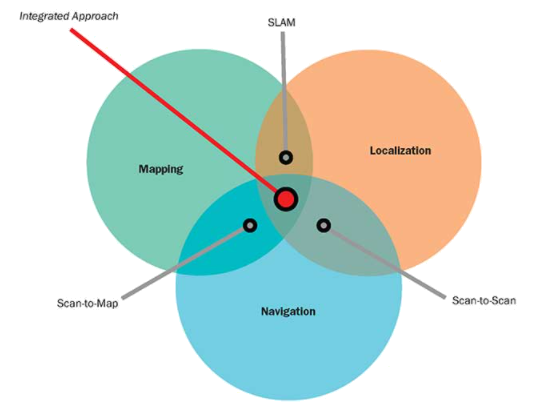
Reading - Migration from Gazebo Classic to Ignition with ROS 2
By Gaurav Gupta | Black Coffee Robotics | Published: 17 July 2023

Artigos - Publicações do Laboratório de Inteligência e Robótica Aplicada - LIRA da PUC-RJ
O Laboratório de Inteligência e Robótica Aplicada - LIRA se dedica à pesquisa e ao desenvolvimento de produtos baseados em modelos inteligentes de BI e Data Mining.

By University of Michigan | On February 21, 2022
APLICAÇÕES, PROJETOS E DEMONSTRAÇÕES
NuttX - JS Robot on NuttX
By Philippe Coval (https://www.rzr.cloudns.org/)
NuttX Online Workshop | August 15-16 2020

BeagleBone Blue/Debian Linux - Building an Autopilot Robot (Part 1)
By Pedro Bertoleti
PUBLISHED IN CIRCUIT CELLAR MAGAZINE | OCTOBER 2018 #339
In this first part of his two-part article series, Pedro Bertoleti lays the groundwork for his autopiloted four-wheeled robot project. Here, he shows the complete path in digital signal processing (DSP) to go to from raw acceleration measurements—obtained from a BeagleBone Blue IMU—to reliable speed estimation using accelerometer data.


BeagleBone Blue/Debian Linux - Building an Autopilot Robot – Part 2
By Pedro Bertoleti
PUBLISHED IN CIRCUIT CELLAR MAGAZINE | NOVEMBER 2018 #340
In part 1 of this two-part article series, Pedro laid the groundwork for his autopiloted four-wheeled robot project by exploring the concept of speed estimation and speed control. In part 2, he dives into the actual building of the robot. The project provides insight to the control and sensing functions of autonomous electrical vehicles.
ROS Projects - 10 ROS projects for beginners
By Staff | Learn Robotics and AI | NOVEMBER 2023
Are you intrigued by the world of Robotics and want to get started with ROS (Robot Operating System)? Look no further! In this comprehensive blog post, I present a curated list of 10 beginner-friendly ROS projects to jumpstart your journey into the fascinating field of robotics. Whether you're a programming enthusiast, a student, or someone with a keen interest in robotics, these projects offer a fantastic way to learn ROS and gain hands-on experience. Let's dive in! Here's a list of 10 beginner-friendly projects to jumpstart your ROS journey.

1️⃣ Simple Publisher-Subscriber Model 📡
2️⃣ TurtleSim Navigation 🐢
3️⃣ Object Detection 📦
4️⃣ Path Planning 🗺️
5️⃣ SLAM Mapping 🗺️
6️⃣ Teleoperation 🕹️
7️⃣ Sensor Fusion 🌡️
8️⃣ Arm Manipulation 🤖
9️⃣ Voice Control 🎤
🔟 Automated Docking 🛑
NuttX Online Workshop | August 15-16 2020
PUBLISHED IN CIRCUIT CELLAR MAGAZINE | OCTOBER 2018 #339
PUBLISHED IN CIRCUIT CELLAR MAGAZINE | NOVEMBER 2018 #340
VÍDEOS
The Construct
From robotics theory to ROS-based robot programming, we’ll help you master the concepts and tools you’ll need to become a ROS Developer.

James Bruton Channel at Youtube
James Bruton ia a former toy designer, current YouTube maker and general robotics, electrical and mechanics.

Introducing the Automatic Charging Robot (ACR) for Electric Vehicles
By Staff | Hyundai | April, 2023
Meet the new Automatic Charging Robot (ACR) and watch how it easily charges our IONIQ 6 by automatically opening the charging port and plugging in the charger. The ACR was developed to operate reliably in all environments, regardless of charger location, weather and potential obstacles. What’s more? The 3D camera-based artificial intelligence algorithm and its control technology allow the robot to accurately plug the charger into the port.

Hyundai x CES 2022 | Expanding to New Realities with Metamobility
By Staff | Hyundai | Nov, 2022
We are here to expand human reach with robotics technology. To unlimit the human beings physical limitations. This is about a future in which robotics will complete the metaverse by connecting the virtual world with reality, and eventually overcome the physical limitations of movement regarding time and space. At CES 2022, Hyundai is showing a world in which robotics not only cover physical motion, but also are smart access platforms for the metaverse as 'Metamobility'. Imagine an ecosystem expanding mobility’s role onto new realities in metaverse world. Expanding to New Realities with Metamobility.
MEC - Close to the user, at the EDGE!
By Staff | ETSI | July 9, 2021
Multi-access Edge Computing (MEC) offers application developers and content providers cloud-computing capabilities and an IT service environment at the edge of the network. The Multi-access Edge Computing (MEC) initiative is an Industry Specification Group (ISG) within ETSI which purpose is to create a standardized, open environment which will allow the efficient and seamless integration of applications from vendors, service providers, and third-parties across multi-vendor Multi-access Edge Computing platforms.

Soft Robots
By George Whitesides | Chalmers University of Technology | May, 2015
Molecular Frontier Synposium at Chalmers University of Technology
Raye Lab - Bio-inspired Robotics
By Prof Raye Yeow | National University of Singapure | May, 2015
The Raye Lab, headed by Prof Raye Yeow, focuses on bio-inspired robotics research and applications. Together with his team of engineers and students, their vision is to study the mechanisms of nature, and to develop biomimetic robotic technologies that resolve automation needs in various industries, including healthcare, food & beverage, fast-moving consumer goods and agritechnology.


From robotics theory to ROS-based robot programming, we’ll help you master the concepts and tools you’ll need to become a ROS Developer.
James Bruton ia a former toy designer, current YouTube maker and general robotics, electrical and mechanics.
By Staff | Hyundai | April, 2023
Meet the new Automatic Charging Robot (ACR) and watch how it easily charges our IONIQ 6 by automatically opening the charging port and plugging in the charger. The ACR was developed to operate reliably in all environments, regardless of charger location, weather and potential obstacles. What’s more? The 3D camera-based artificial intelligence algorithm and its control technology allow the robot to accurately plug the charger into the port.
By Staff | Hyundai | Nov, 2022
We are here to expand human reach with robotics technology. To unlimit the human beings physical limitations. This is about a future in which robotics will complete the metaverse by connecting the virtual world with reality, and eventually overcome the physical limitations of movement regarding time and space. At CES 2022, Hyundai is showing a world in which robotics not only cover physical motion, but also are smart access platforms for the metaverse as 'Metamobility'. Imagine an ecosystem expanding mobility’s role onto new realities in metaverse world. Expanding to New Realities with Metamobility.
By Staff | ETSI | July 9, 2021
Multi-access Edge Computing (MEC) offers application developers and content providers cloud-computing capabilities and an IT service environment at the edge of the network. The Multi-access Edge Computing (MEC) initiative is an Industry Specification Group (ISG) within ETSI which purpose is to create a standardized, open environment which will allow the efficient and seamless integration of applications from vendors, service providers, and third-parties across multi-vendor Multi-access Edge Computing platforms.
By George Whitesides | Chalmers University of Technology | May, 2015
Molecular Frontier Synposium at Chalmers University of Technology
By Prof Raye Yeow | National University of Singapure | May, 2015
The Raye Lab, headed by Prof Raye Yeow, focuses on bio-inspired robotics research and applications. Together with his team of engineers and students, their vision is to study the mechanisms of nature, and to develop biomimetic robotic technologies that resolve automation needs in various industries, including healthcare, food & beverage, fast-moving consumer goods and agritechnology.
ASSOCIAÇÕES, FUNDAÇÕES, PROJETOS DE PESQUISA, CONSÓRCIOS, PARCERIAS, ALIANÇAS E COMUNIDADES
IFR - International Federation of Robotics
The International Federation of Robotics (IFR) connects the world of robotics around the globe. The IFR was established as a non-profit organization in 1987. The institutional members of IFR come from the robotics industry, national or international industry associations and research & development institutes. Our federation directly represents over 90 members from more than 20 countries. The main aim and purpose are: to promote the positive benefits of robots for productivity, competitiveness, economic growth and quality of work and life; to promote research, development, use and international co-operation in the entire field of robotics; to act as a focal point for organizations and governmental representatives in activities related to robotics; to promote and strengthen the robotics industry worldwide; to cause public awareness about robotics technologies and to deal with other matters of relevance to our members.

ROS-I - ROS Industrial
ROS-Industrial is an open-source project that extends the advanced capabilities of ROS software to industrial relevant hardware and applications.
ISO/TC 299 Robotics - Technical Comitee 299 Robotics
ISO/TC 299 has the goal to develop high quality standards for the safety of industrial robots and service robots to enable innovative robotic product to be brought onto the market. In addition, ISO/TC 299 has the goal to foster the growth of the robotic market by introducing standards in fields like terminology, performance measurement and modularity. The scope of ISO/TC 299 reads “Standardization in the field of robotics, excluding toys and military applications.”

OPEN ROBOTICS - Open Source Robotics Foundation
Open Source Robotics Foundation, Inc. (OSRF) was established in 2012. OSRF is incorporated in California as a Nonprofit Public Benefit Corporation. OSRF's original mission is to "support the development, distribution, and adoption of open source software for use in robotics research, education, and product development." OSRF´s aim is to be the hub of the global robotics community. To that end, OSRF creates open software and hardware platforms for robotics, and it uses those platforms to solve important problems and help others to do the same.

ORP - Open Robotic Platform
Open Robotic Platform (ORP) is dedicated to provide an open and versatile platform for robotics enthusiasts. Slogan: "ROBOTICS MADE EASY WITH SIMPLE DESIGN RULES".

Modern Robotics - Northwestern Center for Robotics and Biosystems
This is the home page of the textbook "Modern Robotics: Mechanics, Planning, and Control," Kevin M. Lynch and Frank C. Park, Cambridge University Press, 2017, ISBN 9781107156302. Purchase the hardback through Amazon or through Cambridge University Press, or check out the free preprint version.

PIB - Print, Build & Develop Your Own Robot
Printable Intelligent Bot (PIB) is an open source robotic project that offers everyone interested a unique opportunity to get involved with the topics of robots, 3D printing and AI. PIB is a 3D printable humanoid robot that anyone can build themselves in 3 steps: print, build and develop.
Open Robotic Platform (ORP) is dedicated to provide an open and versatile platform for robotics enthusiasts. Slogan: "ROBOTICS MADE EASY WITH SIMPLE DESIGN RULES".
BLOGS e WIKIS
Blog do Professor Marcelo José Rovai com projetos, práticas e tutoriais.
Compartilhamento de idéias e experiências no mundo da Eletrônica. Ênfase no uso de plataformas de desenvolvimento baseadas em microcontroladores, como Arduino e computadores completos do tamanho de cartões de crédito como o Raspberry-Pi.
Blog - Eletrogate
Conteúdos sobre Robótica publicados pela empresa Eletrogate.

Blog - Usinainfo
Conteúdos sobre Eletrônica, Robótica, IoT, Arduino, Raspberry Pi, ESP 32 publicados pela empresa Usinainfo.

Blog - PAL Robotics Blog
PAL Robotics is a team of passionate engineers that design, craft and customize humanoid robots to help you to push your organization to the next level

Blog - Engineered Arts Blog
Engineered Arts is the UK’s leading designer and manufacturer of humanoid entertainment robots. For science centres, theme parks and businesses looking to attract a crowd, our robots make for an experience that visitors, delegates and audiences will never forget.

Wiki - Northwestern University Mechatronics Wiki
Center for Robotics and Biosystems
The Northwestern University mechatronics design wiki provides reference material on the theory and applications of electronics, sensors, actuators, etc., for use in mechatronics-related research and projects. Practical applications often refer to equipment and supplies available in the Northwestern Mechatronics Design Lab.

Compartilhamento de idéias e experiências no mundo da Eletrônica. Ênfase no uso de plataformas de desenvolvimento baseadas em microcontroladores, como Arduino e computadores completos do tamanho de cartões de crédito como o Raspberry-Pi.
Conteúdos sobre Robótica publicados pela empresa Eletrogate.
Conteúdos sobre Eletrônica, Robótica, IoT, Arduino, Raspberry Pi, ESP 32 publicados pela empresa Usinainfo.
PAL Robotics is a team of passionate engineers that design, craft and customize humanoid robots to help you to push your organization to the next level
Engineered Arts is the UK’s leading designer and manufacturer of humanoid entertainment robots. For science centres, theme parks and businesses looking to attract a crowd, our robots make for an experience that visitors, delegates and audiences will never forget.
Center for Robotics and Biosystems
The Northwestern University mechatronics design wiki provides reference material on the theory and applications of electronics, sensors, actuators, etc., for use in mechatronics-related research and projects. Practical applications often refer to equipment and supplies available in the Northwestern Mechatronics Design Lab.
REDES SOCIAIS, COMUNIDADES, FÓRUMS E REPOSITÓRIOS PARA PROGRAMADORES E DESENVOLVEDORES
(SOCIAL NETWORKS FOR PROGRAMMERS AND DESIGNERS)
(SOCIAL NETWORKS FOR PROGRAMMERS AND DESIGNERS)
Github.
* - Plataforma de desenvolvimento que permite gerenciar o armazenamento de códigos. .
* - Comunidade de desenvolvedores. Contém uma biblioteca de projetos em múltiplas plataformas. Abrange machine learning, IoT, sensores, robótica, dentre outros tópicos.

* - Dentre os diversos tópicos, contempla artificial intelligence, deep learning, tensor flow,... .
* - Repositório de códigos e data sets, comunidade, cursos e competições .

* - Forum to talk about ROS and ROS related things.

* - Forum to talk about Gazebo simulator and related things. News and general discussion about Gazebo, Ignition, and simulation (General); questions about Gazebo (Help); minor and patch releases for all libraries (Releases); discussion about the community site, its organization, how it works, and how it can be improved; job openings of interest to Gazebo users (Jobs); and other category.

CLIPPING de NOTÍCIAS (NEWS)
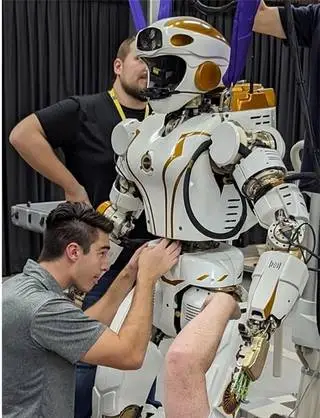
06/07/2023 - NASA Humanoid Robot to Be Tested in Australia
By Office of Communications, Johnson Space Center | NASA | July 06, 2023
NASA’s Valkyrie robot is beginning a new mission half a world away from its home at the agency’s Johnson Space Center in Houston..
04/10/2022 - What Robotics Experts Think of Tesla’s Optimus RobotRoboticists from industry and academia share their perspectives on Tesla’s new humanoid
By Evan Ackerman and Erico Guizzo | IEEE Spectrum | October 04, 2022
Tesla CEO Elon Musk unveiled the Optimus humanoid robot at AI Day on 30 September, 2022. In a brief demo, the robot walked, waved, and danced on stage. While robotics experts praised the Tesla team for putting the prototype together so quickly, most were unimpressed by its design. Robotics experts posted their thoughts on Twitter, LinkedIn, Substack, and elsewhere, and with their permission, and here is a collection of them for you. Many of these folks wrote a lot more than they have room to include, but you can follow the link in a particular expert’s name to see their complete commentary. .

01/10/2022 - Tesla boss Elon Musk presents humanoid robot Optimus
By Shiona McCallum | BBC News | October 01, 2022
Tech billionaire Elon Musk has presented the latest prototype of a humanoid robot being developed by his Tesla electric car company. .

13/08/2022 - Xiaomi anuncia robô humanoide capaz de reconhecer emoções
Por Igor Nishikiori | TechTudo | 13 de agosto de 2022
A Xiaomi revelou nesta quinta-feira (11) o desenvolvimento do robô humanoide CyberOne, o primeiro do tipo criado pela empresa chinesa. O anúncio foi feito durante uma conferência em Pequim. Medindo 1,77 m e pesando 52 kg, o robô tem em seu "cérebro" uma inteligência artificial capaz de identificar até 85 tipos de sons ambiente e 45 tipos de emoções humanas.


02/04/2022 - A new era for Gazebo
By Gazebo Dev Team| April 02, 2022
The simulation team at Open Robotics announced a big change: they’ll be retiring the “Ignition” name in favor of the good old “Gazebo ” brand that..


11/03/2022 - Roach has nothing on this adorable robot horse that can deploy an aerial drone
By Jorge Jimenez , PCGamer| March 11, 2022
In our time of need, it will be the robot horse that will save us from rampaging robot dogs..

28/02/2022 - Combining Robotics And Logistics
By Masamichi Ujiie, FedEx| First published: June 26, 2020 ! Updated: February 28, 2022
The time for robots to start providing logistics services directly to end users is only just beginning. Still, considering future innovation is an exciting prospect. One potential way of providing new value is to build a local delivery network that supports people and communities through inter-industry collaboration..


23/02/2022 - Robotic cubes shapeshift in outer space
By Rachel Gordon | MIT CSAIL| February 23, 2022
Self-reconfiguring ElectroVoxels use embedded electromagnets to test applications for space exploration..


18/02/2022 - Self-healing materials for robotics made from 'jelly' and salt
By Staff | University of Cambridge| February 18, 2022
Self-healing materials for robotics made from 'jelly' and salt.


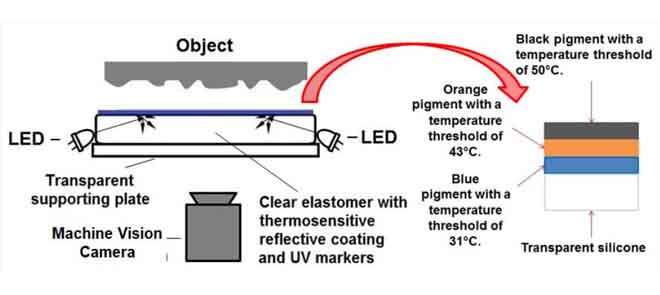
15/02/2022 - Sensor mimics automatic human reaction to heat, could herald soft robots of the future
By Staff | Liverpool Hope University| February 15, 2022
A new robotic sensor that mimics the automatic human reaction to heat is being hailed as a world first. The device has been built by a team of experts from Liverpool Hope University, who say it's the first sensor that can trigger this 'sensory impulse' that the robotics community has yet seen.
24/01/2022 - Self-powered stretchable thermometer can be integrated into soft robots, smart clothing
By Leah Burrows | Harvard John A. Paulson School of Engineering and Applied Sciences| January 24, 2022
Self-powered sensor can be integrated into soft robots, smart clothing...The next generation of soft robotics, smart clothing and biocompatible medical devices are going to need integrated soft sensors that can stretch and twist with the device or wearer. The challenge: most of the components used in traditional sensing are rigid.
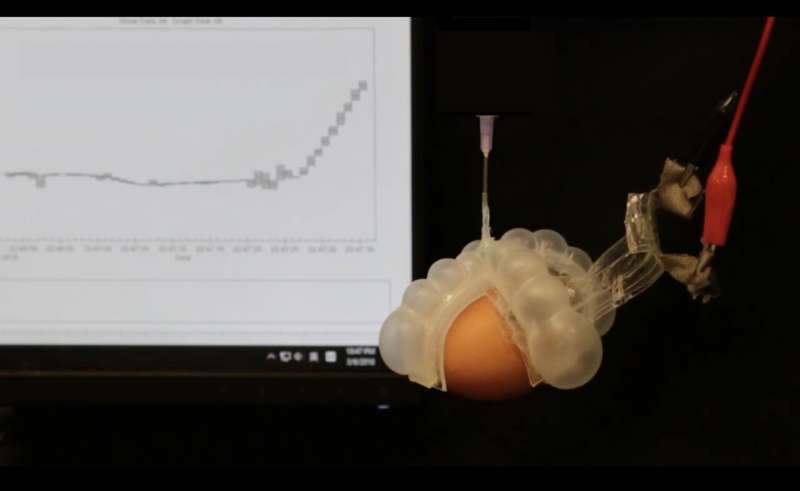
28/12/2021 - NUS engineers bring a soft touch to commercial robotics
By Staff | NUS News/National University of Singapore | December 28, 2021
Inspired by the natural dexterity of the human hand, a team of engineers from the National University of Singapore (NUS) has created a reconfigurable hybrid robotics system that is able to grip a variety of objects: from the small, soft and delicate to the large, heavy and bulky. This technology is expected to impact a range of industries, involving food assembly, vertical farming and fast-moving consumer goods packaging, which will progressively automate more of their operations in the coming years.


10/05/2020 - iFood lança robô entregador de comida
Por Mattheus Goto | Forbes | 10 de maio de 2020
O robô Ada vai transportar até 30 kg e terá autonomia de 12 horas de trabalho.

18/10/2018 - Sex Robots – a disturbing look inside one of the world’s fastest growing industries
By Oli Ballard | Business Leader | October 18, 2018
Sex sells. It is the oldest product in the world. For thousands of years, humans have grappled with the ethics of sex as a service – is it ethical, what are the risks etc? But what if you could have 100% safe sex with no negative implications? If this sounds too good to be true, this is how sex robots are being marketed in the 21st century. As the ultimate and safe outlet for our deepest desires.

PODCASTS, TALKS e ENTREVISTAS
PODCAST - VALKYRIE
HOUSTON WE HAVE A PODCAST| NASA | SEASON 1EPISODE 309 | Duration: 01:07:10 | OCT 13, 20231
From Earth orbit to the Moon and Mars, explore the world of human spaceflight with NASA each week on the official podcast of the Johnson Space Center in Houston, Texas. Listen to in-depth conversations with the astronauts, scientists and engineers who make it possible. On episode 309, Johnson’s deputy team lead of dexterous robots Evan Laske describes the design and ambitions of the humanoid robot Valkyrie. This episode was recorded on September 8, 2023.

GLOSSÁRIOS, FOLHAS DE REFERÊNCIAS E DEFINIÇÕES
Glossário - A Glossary of Terms for Robotics
By US Departament of Commerce - 1981.
Glossário - Robotics Terminology
By Jose´ A. Ceroni and Shimon Y. Nof, Purdue University (West Lafayette, Indiana).
Handbook of Industrial Robotics, Second Edition. Edited by Shimon Y. Nof.
Copyright © 1999 John Wiley & Sons, Inc..

By US Departament of Commerce - 1981.
By Jose´ A. Ceroni and Shimon Y. Nof, Purdue University (West Lafayette, Indiana).
Handbook of Industrial Robotics, Second Edition. Edited by Shimon Y. Nof.
Copyright © 1999 John Wiley & Sons, Inc..